前言
未來三年全球還需要超過 130 萬台!「三大因素」讓中國成為工業機器人最大需求者!
在上一篇文章中
我們介紹了工業機器人的定義
以及該產業的市場規模
預計未來三年全球還會購入 130 萬台以上
而相較之下前十大工業機器人生產國的產量
不到 31 萬台
此外也強調了在人口紅利消散、
工資提升、工業機器人密度低於其他製造大國
這三因素的影響下
中國成為了拉抬市場的主要力量
而在本篇文章中
我們將繼續介紹工業機器人
讓讀者們認識常見的五種工業機器人
了解不同型態工業機器人的功能與主要應用產業
此外也將剖析工業機器人的產業鏈
一探一台工業機器人從原料到成型的步驟
以及揭開成本結構的面紗
本文將分成幾個重點來呈現【工業機器人機械結構的組成:關節、手軸、手腕、基底】
【五種型態的工業機器人:不同的機械結構界定出各異的型態】
【工業機器人產業的上下游:零組件、整機、出貨】
【工業機器人的成本主要由機構、驅動模組、整機構成】
【讓你帶走的結論】
工業機器人機械結構的組成:關節、手軸、手腕、基底
工業機器人誕生後,隨著不同的產業應用
而開發出五種具有不同機械結構特徵的類型
如之前提到過的
工業機器人誕生在 1961 年
最早是應用在汽車工業裡
而且功用相當單一
只是重覆汽車製造環節中的壓鑄( die casting )步驟
即將金屬壓製成特定形狀的工序
當時一台工業機器人的成本高達 65,000 美元
若以每年通膨率 3.7% 來計算的話
大約等於今天的 55 萬美元!
不過隨著各產業大幅度應用工業機器人後
不只因為規模經濟的關係
使得工業機器人的價格開始下降
而且不同產業的應用場景
也催生出不同型態的工業機器人
根據國際機器人聯盟( International Federation of Robotics, IFR )的分類
工業機器人可以依據其機械結構區分成五種型態
但在正式介紹之前
我們先來了解一下機械結構是甚麼意思
機械結構包含關節跟手軸形塑了不同類型工業機器人在外觀上的差異
直白地說
所謂的機械結構可以體現在工業機器人的內、外在造型上
而這個造型的差異可以由其擁有的手軸、關節的數量決定
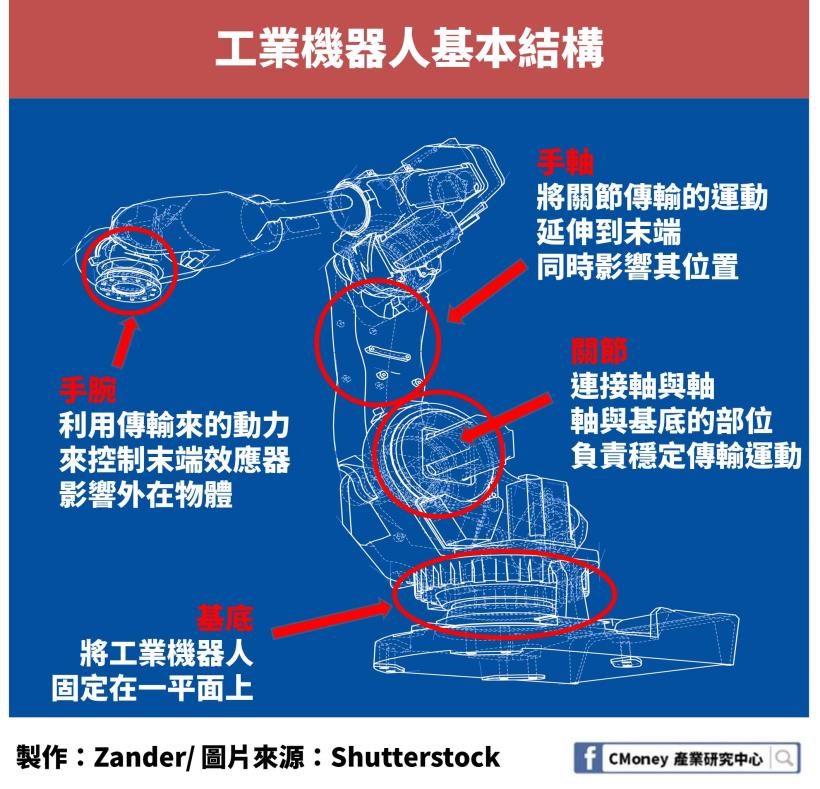
圖中提到可附加在手腕的是末端效應器( End-effector )
一般分成夾爪類和工具類兩大種
夾爪用在夾取生產線上的物體
而工具則有多種功能
像是有些是用來上漆
也有些可以用來鎖螺絲等
因此在工業機器人手腕裝上不同的末端效應器
即可賦予它們不同的能力
工業機器人擁有越多的關節就有越多的自由度能夠更方便地抵達空間中的指定位置
能處理多任務的工業機器人通常有更複雜的結構
像是有較多關節跟手軸的工業機器人
常意味著它能夠抵達空間中越多的位置
這就是工業機器人領域談到的自由度( Degree of Freedom, DoF )
越多關節就越「自由」
也就能應用在更難處理的任務上
就以人類的手臂當作一個例子
正常的手臂可以碰觸到的範圍
相比同一支手臂但卻少了一個關節的情況
勢必是後者來的受侷限、不自由
同樣要拿桌上的東西
如果無法彎曲或伸長手臂
則要移動整個身體才拿得到
所以這種手臂的自由度就小於正常手臂
另一方面
也由於越多自由度意味著
一台工業機器人可以更加任意地移到空間中的不同位置
所以通常也就是售價越高的工業機器人
因此對要引進工業機器人的公司來說
一定要釐清自己想讓工業機器人負責的生產環節
到底是適用於多少自由度的工業機器人來處理
否則就殺雞用牛刀了
多花不必要的錢在購置工業機器人上
五種型態的工業機器人:不同的機械結構界定出各異的型態搞懂了工業機器人的基本機械結構後
就讓我們回歸正題開始介紹五種型態的工業機器人:
直角坐標機器人( Cartesian robot )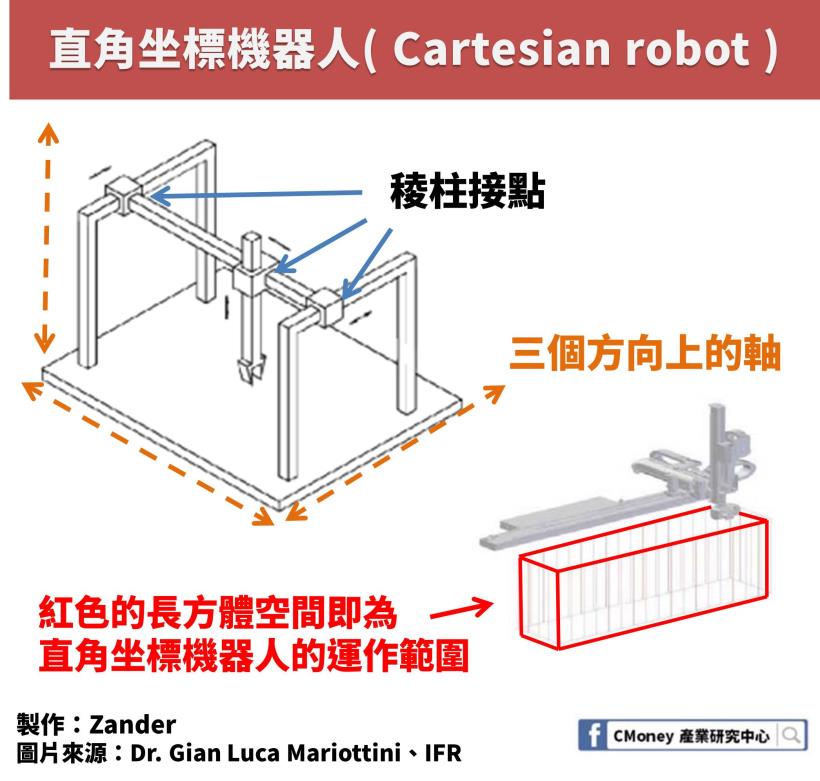
由三個稜柱接點( prismatic joints )構成三個方向上的軸
稜柱接點是關節的一種
每個稜柱接點可在單軸上做線性滑動
因此三個方向上的線性滑動
構成的移動範圍為一長方體空間
直角坐標機器人常用在搬運重物上
也可應用在檢測、切割、包裝等工序中
我們可以在許多產業看到它的身影
如汽車工業、半導體產業
同時也常是最便宜跟較容易打造的工業機器人
SCARA機器人( SCARA robot )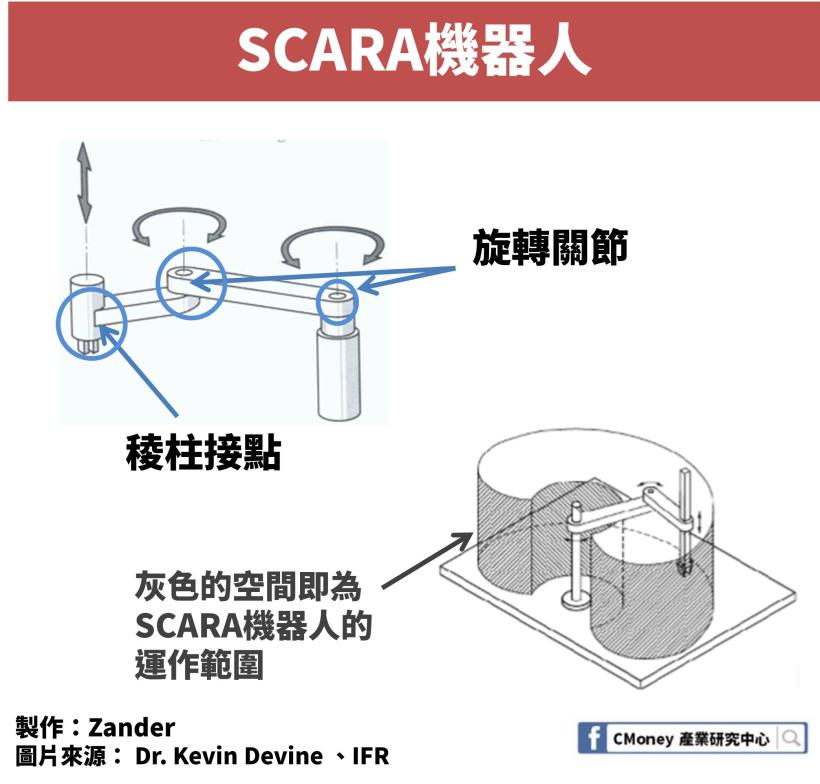
SCARA 為 Selective Compliance Articulated Robot Arm 的簡稱
直譯為選擇順應性關節機械手臂
是由一個稜柱接點和兩個旋轉關節構成
前面講過稜柱接點是線性滑動的關節
而旋轉關節則是可以 360 度旋轉
構成的移動範圍為一扁平的空心半圓柱體
相較於直角坐標機器人
SCARA機器人的體積較小、可搬運的重量沒那麼大
但是在空間中移取物品的速度較快
由於結構更為複雜
所以一般在售價上也比直角坐標機器人貴
常用在快速分揀、精密裝配等工序上
一樣也會出現在許多產業中
如晶圓製造業、面板業、終端電子產品組裝
平行機器人( Parallel robot )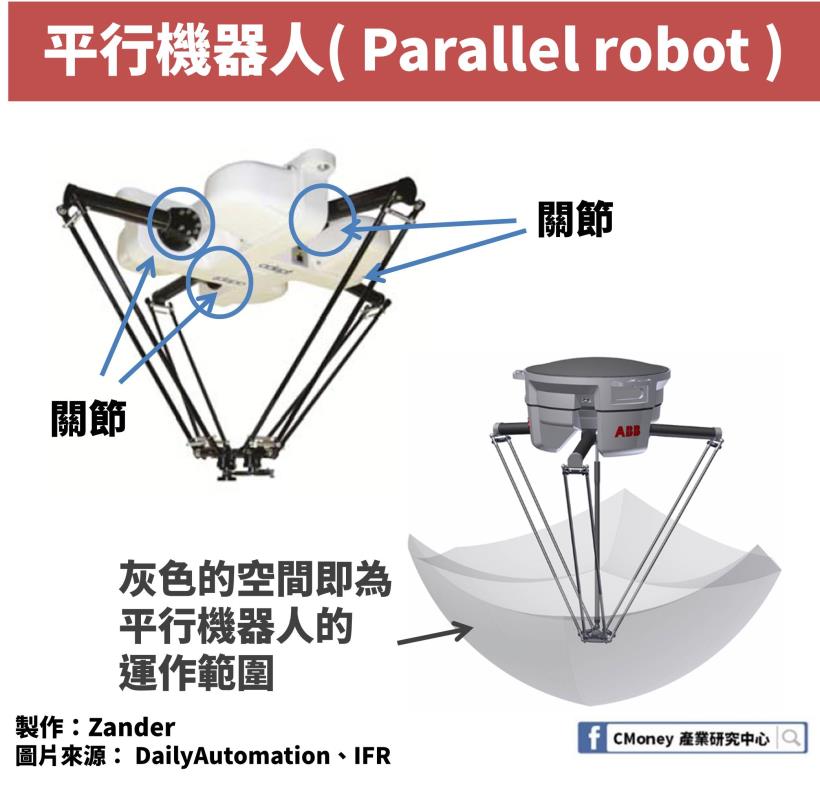
這種工業機器人具有多個機械臂
而在臂上裝有稜柱接點或旋轉關節
且這些臂是同步運作的
由於高準確度、高搬運速度的特性
平行機器人常用在流水式的生產線上
會出現在汽車零件製造、電子零組件生產等產業中
圓柱座標型機器人( Cylindrical robot )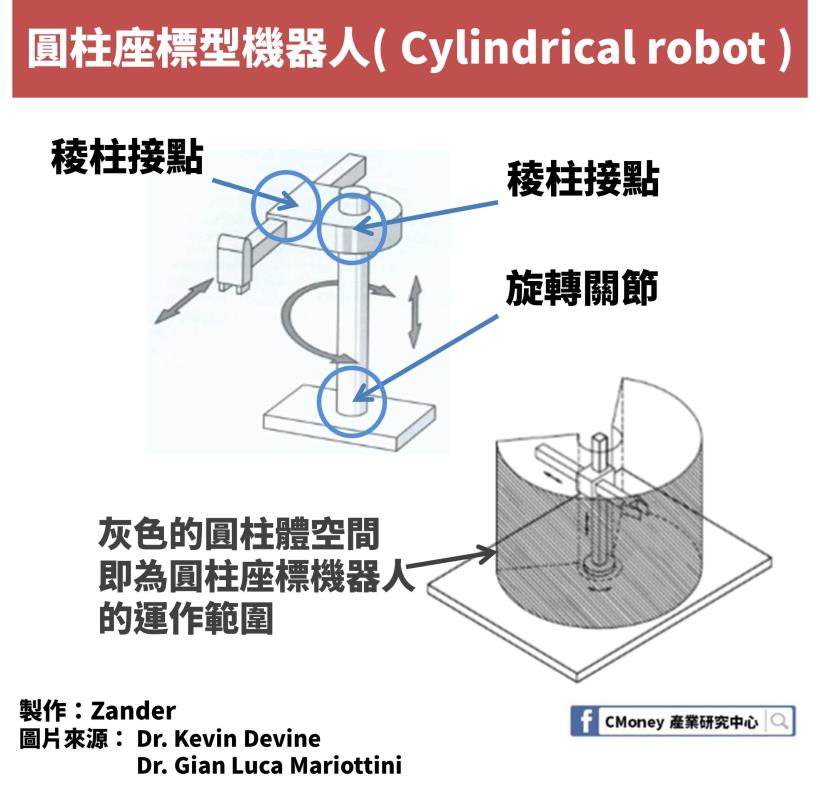
由兩個稜柱接點和一個旋轉關節構成
構成的移動範圍為一直長的圓柱體
至今已經不太常使用圓柱座標型機器人
所以可以看到許多統計數字已經不包含此一型的工業機器人
多關節機器人( Articulated robot )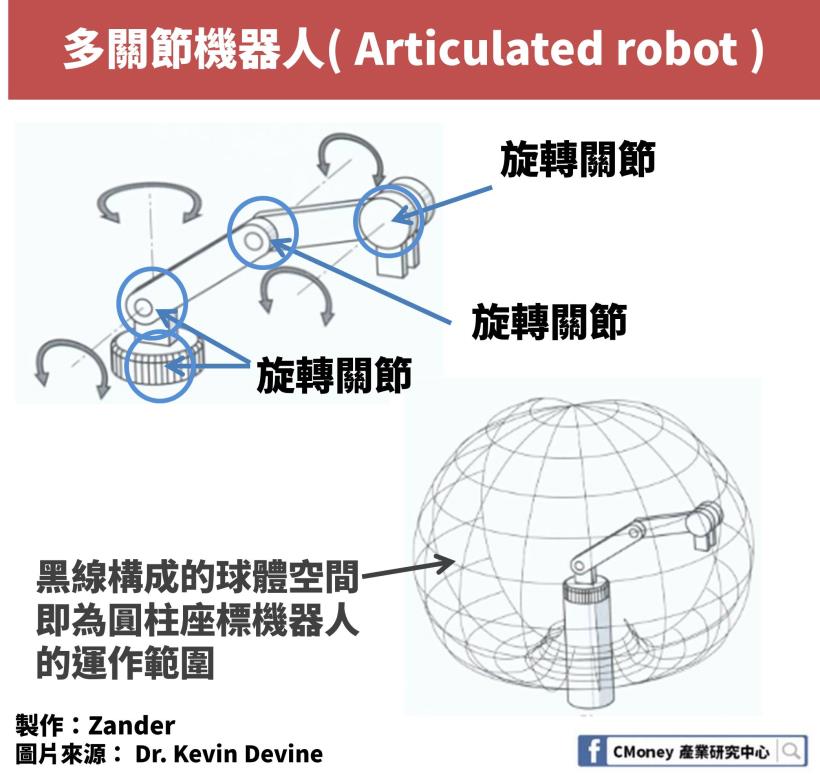
正如它的名字所表示的
這種工業機器人至少由三個旋轉關節構成
構成的移動範圍為一圓球體
移動的靈敏度相當高
自由度最高
由於應用的領域相當廣泛
可以執行組裝、搬運、包裝、焊接等工序
在售價上則是較其他型態的工業機器人貴
也是目前最常見的工業機器人
這一點我們可以觀察全球最大市場中國的資料來判斷出:
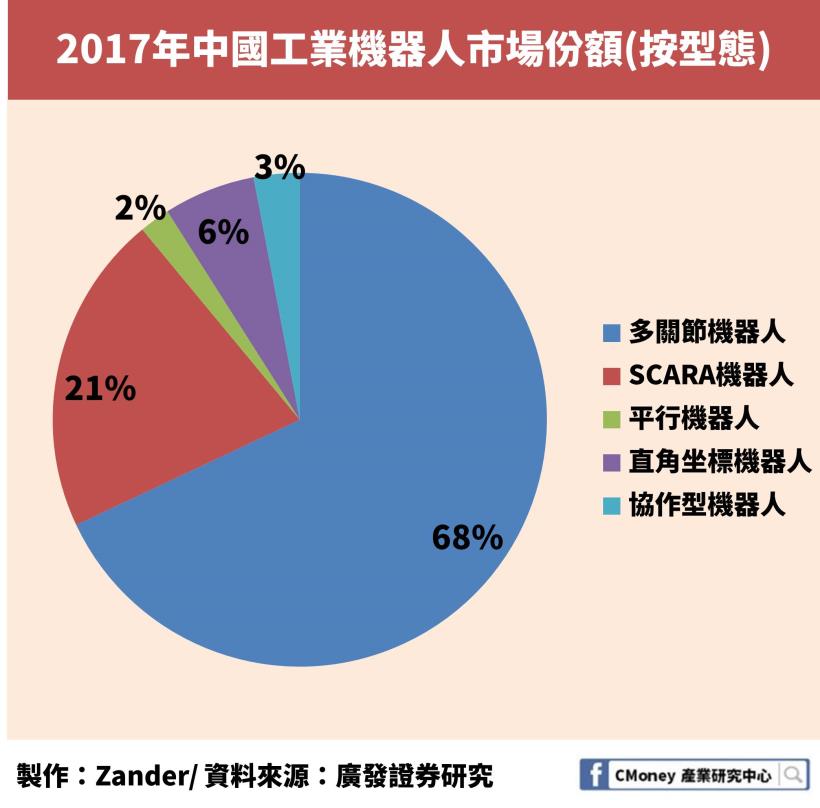
足見其在目前的各產業中應用的有多廣
最後
我們可以把前面提到的五種工業機器人
在下表中一次整理出它們的特性:

工業機器人產業的上下游:零組件、整機、出貨
認識完五種工業機器人的型態後
接著我們就來一窺一台工業機器人如何從無到有

工業機器人的上游零組件可以分成
機構模組、感測模組、驅動模組三大類
首先是機構模組
我們之前介紹過的傳動元件就是其中很重要的一種
它扮演的角色是穩定傳遞動力
使得工業機器人可以實際擺出不同的動作
精確地移動到空間中的指定位置
接著是感測模組
扮演的角色是讓工業機器人可以感應來自外界的刺激
就如同人的眼睛、耳朵
有了相對應感測裝置的工業機器人
便可以感知到生產線上的物體在哪、壓力跟聲音的大小
常見的感測模組包括
壓力偵測器、位置感知裝置、影像掃描等
最後是驅動模組
扮演的角色是提供動力的來源
工業機器人能不能動起來
就是依靠它
常見的驅動模組有伺服馬達、減速器
伺服馬達供給機器人需要的動力
而減速器則是構成旋轉關節的部分
藉由調整機器內齒輪的轉速
將動力分配在不同的軸
中游產業:將工業機器人給組裝出來並裝上控制器將工業機器人組裝成形
成為前面我們講到的五種型態的工業機器人
在整機領域中
世界上有幾家重要的公司
三菱電機( Mitsubishi electric )、歐姆龍( Omron )、
發那科( Fanuc )、安川( Yaskawa )、 ABB、庫卡( KUKA )等
而台灣本土的公司則有上銀( 2049 )、台達電( 2308 )、廣運( 6125 )
當中不乏有能力整合上游者
像是上銀就可以自製部分的驅動模組跟機構模組
控制模組
扮演著工業機器人的大腦的角色
可歸在中游到下游
有些整機廠會安裝自己的系統
同時有的下游代理商或者工廠
可能會在買入工業機器人後使用自己的系統
這些控制系統的功用在於發號施令
藉由在上面重新編寫程式
可以安排工業機器人處理不同的任務
這一塊領域的主要廠商有台達電、西門子( Siemens )、
松下( Panasonic )、安川( Yaskawa )等
下游產業:囊括所有需要大量製造的行業最後出貨的對象則非常廣
上一篇文章中我們曾整理 IFR 的資料為下圖:

可以看到大宗的客戶為汽車產業和電子製造業
但同時在金屬加工、塑膠、化工、食品領域都有廠商在使用工業機器人
因此可說是幾乎囊括所有需要大規模生產的行業
工業機器人的成本主要由機構、驅動模組、整機構成從上游到下游
實際是哪一個部分最耗費成本的呢?
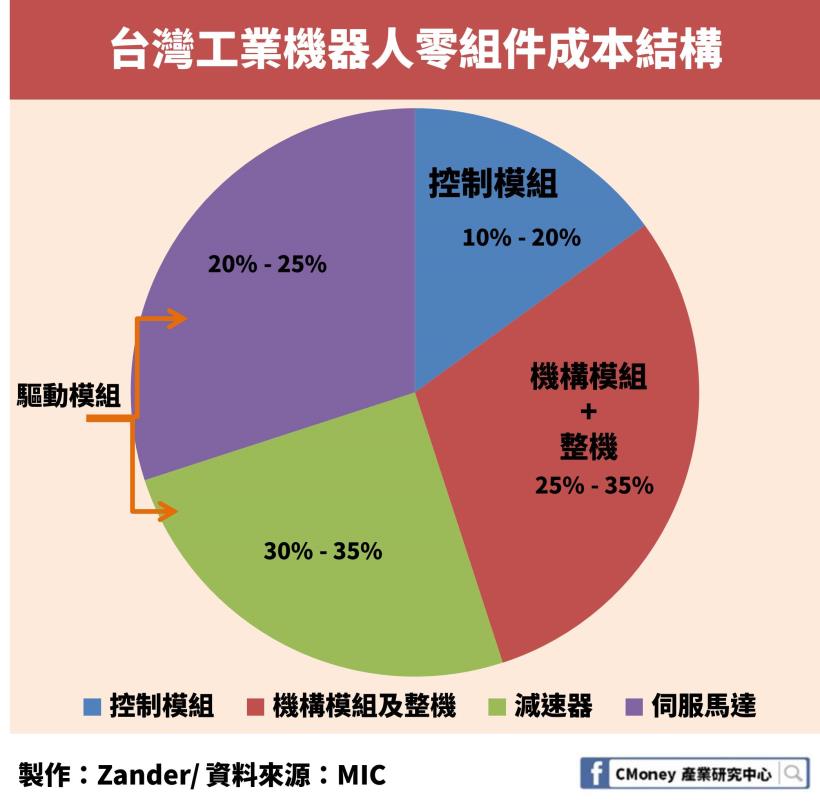
以台灣的工業機器人為例
調查中不包括感測模組
一般來說驅動模組是最貴的部分
其中伺服馬達佔比約 20% - 25%
而被稱為工業機器人心臟的減速器
則是佔比 30% - 35%
堪稱工業機器人最昂貴的零件
所以對整機廠商來說
往上游整合的好處便是壓低購買驅動模組的成本
尤其是要生產多關節機器人時
所需要的減速器也越多
因此成本更是水漲船高
接著是機構模組跟整機服務
佔去了成本的 25% - 30%
最後才是控制模組
由於大部份是軟體層面的應用
進入門檻相對不高
所以這一塊市場有著大量的廠商在競爭
導致了其對整機廠商來說不是太耗費成本的部分
到此
我們對於工業機器人的五種型態
有了基本的認識
像是機械結構特性、目前的市佔比率等
也了解一台工業機器人的成本結構
在下一篇文章中
我們將會從本篇文章提到的這些廠商入手
一一分析跟比較國際大廠和台灣廠商
帶大家認識他們的發展概況、獲利表現
以及對工業機器人產業來說
未來幾年的展望跟技術走向為何
讓你帶走的結論1. 工業機器人依據其機械結構分成五種類型
2. 公司視自己的需求購置適當的工業機器人,不盲目追求高自由度
3. 目前最常見的為多關節機器人,在中國市佔 68%,且價格較高
4. 工業機器人中最有價值的部分為驅動模組,佔成本的一半以上
免責聲明:
此為產業分析文,並非投資進出建議!
馬上點我下載「自動繳APP」→https://bit.ly/2T2TQ5I
</span> </p2>
from MONEY錢 - 最新文章 https://www.moneynet.com.tw/article/6786/一文弄懂五大類工業機器人原來這一個零件佔成本超過3成六成的工業機器人都是同一種

沒有留言:
張貼留言